Projects
A selection of projects that I'm not too ashamed of
AnyPlace: Learning Generalized Object Placement for Robot Manipulation
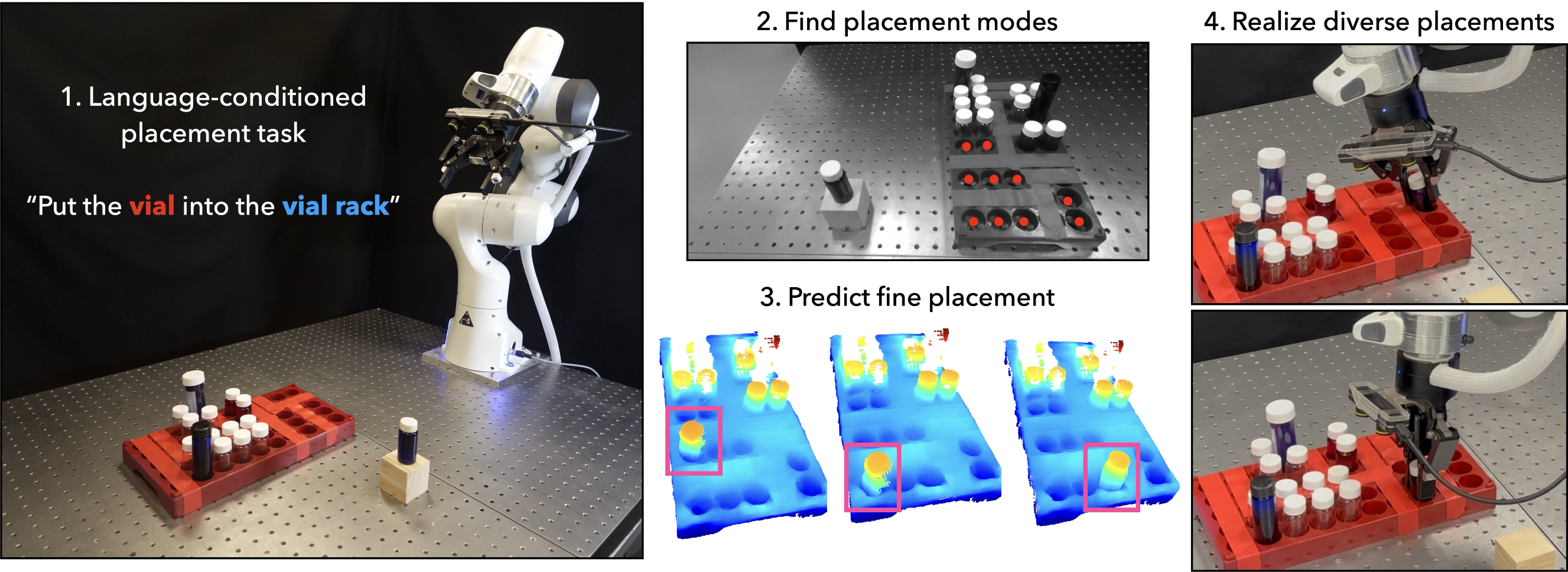
We propose AnyPlace, a two-stage method trained entirely on synthetic data, capable of predicting a wide range of feasible placement poses for real-world tasks.
ORGANA: A Robotic Assistant for Automated Chemistry Experimentation and Characterization - Accepted by Matter Journal
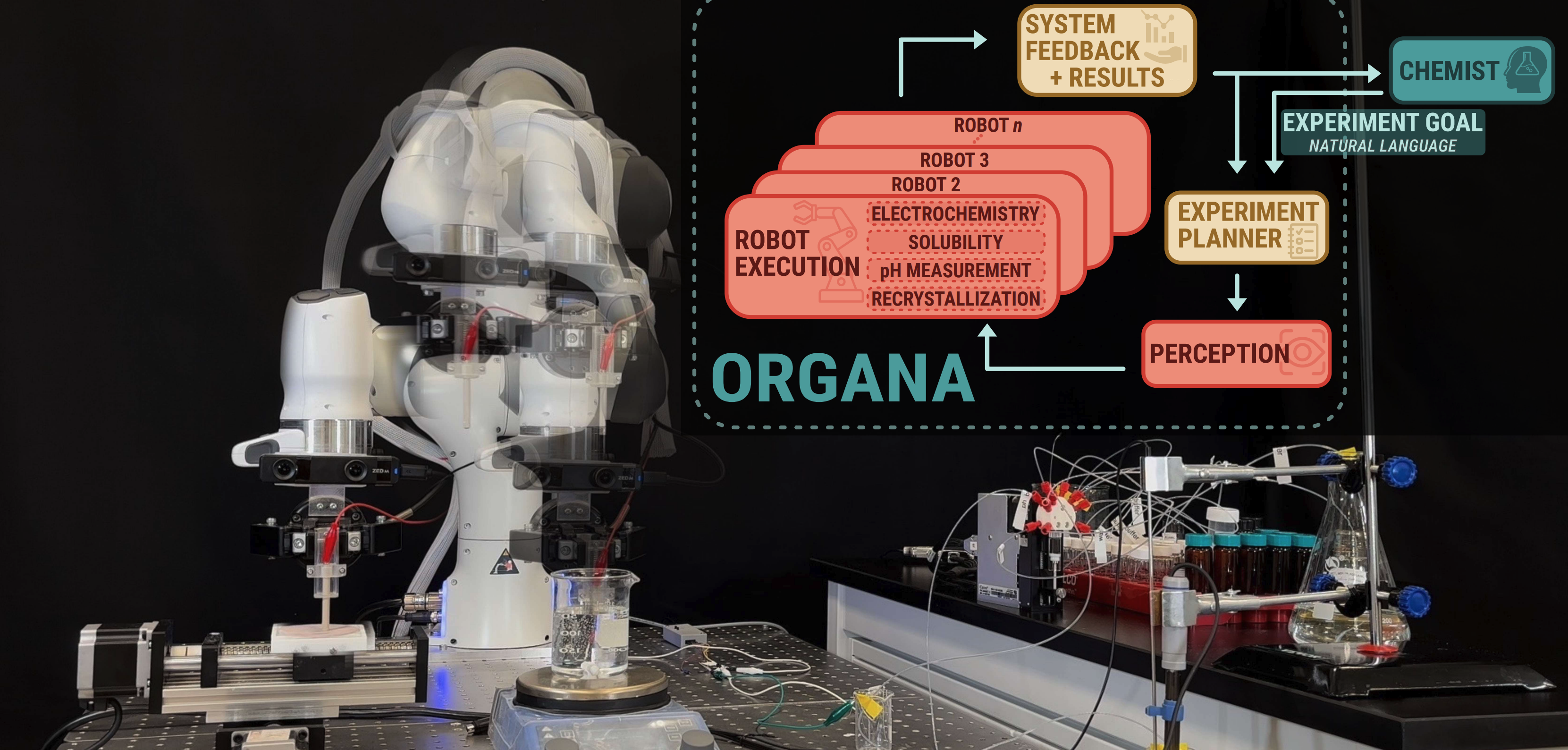
we propose a human-friendly and flexible robotic system, ORGANA, that automates a diverse set of chemistry experiments. It is capable of interacting with chemists in the lab through natural language, using Large Language Models (LLMs).
MVTrans: Multi-View Perception of Transparent Objects - Accepted by ICRA 2023
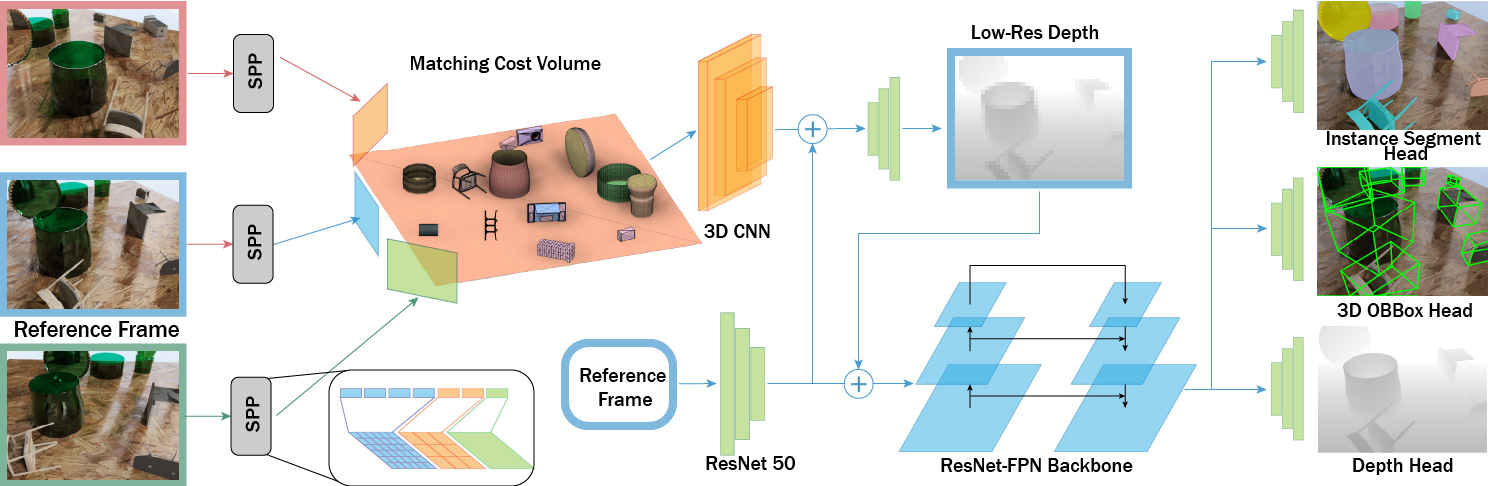
Our proposed method, MVTrans, is an end-to-end multi-view architecture with multiple perception capabilities, including depth estimation, segmentation, and pose estimation. Additionally, we establish a novel procedural photo-realistic dataset generation pipeline and create a large-scale transparent object detection dataset, Syn-TODD, which is suitable for training networks with all three modalities, RGB-D, stereo and multi-view RGB.
RoboFeeder: An Autonomous Robotic System for In-mouth Feeding with Closed-loop Control - Featured by Kinova Robotics
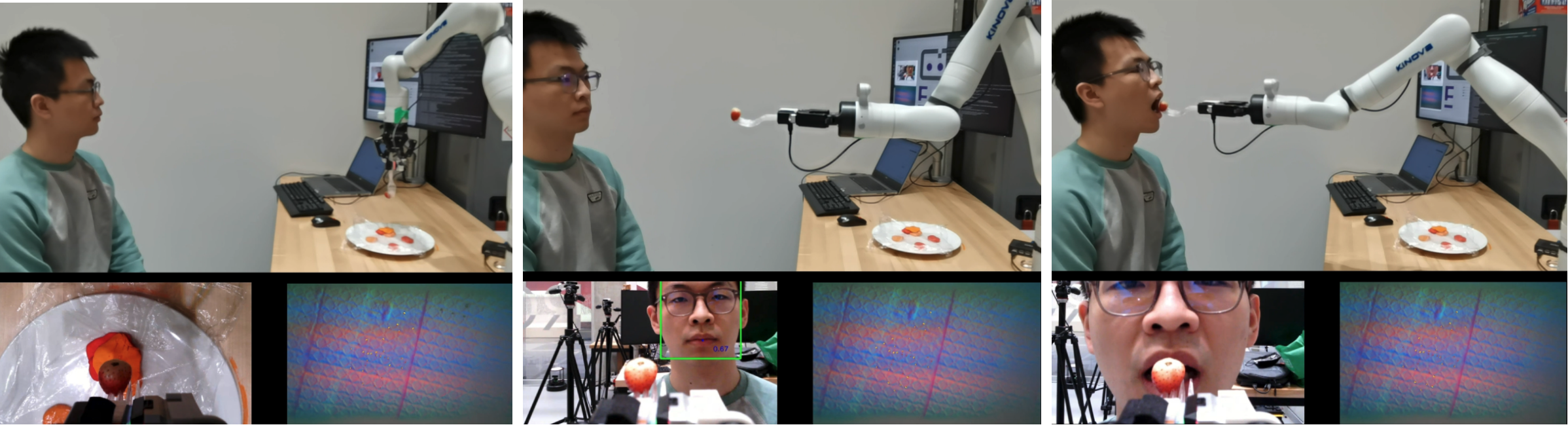
RoboFeeder is a vision-based robot feeding system using a Gelsight tactile sensor and a Kinova Gen3 arm that can skewer food and feed people with disabilities.
